Poster Presentation at International Forum for Agricultural Robotics (FIRA USA)
Published:
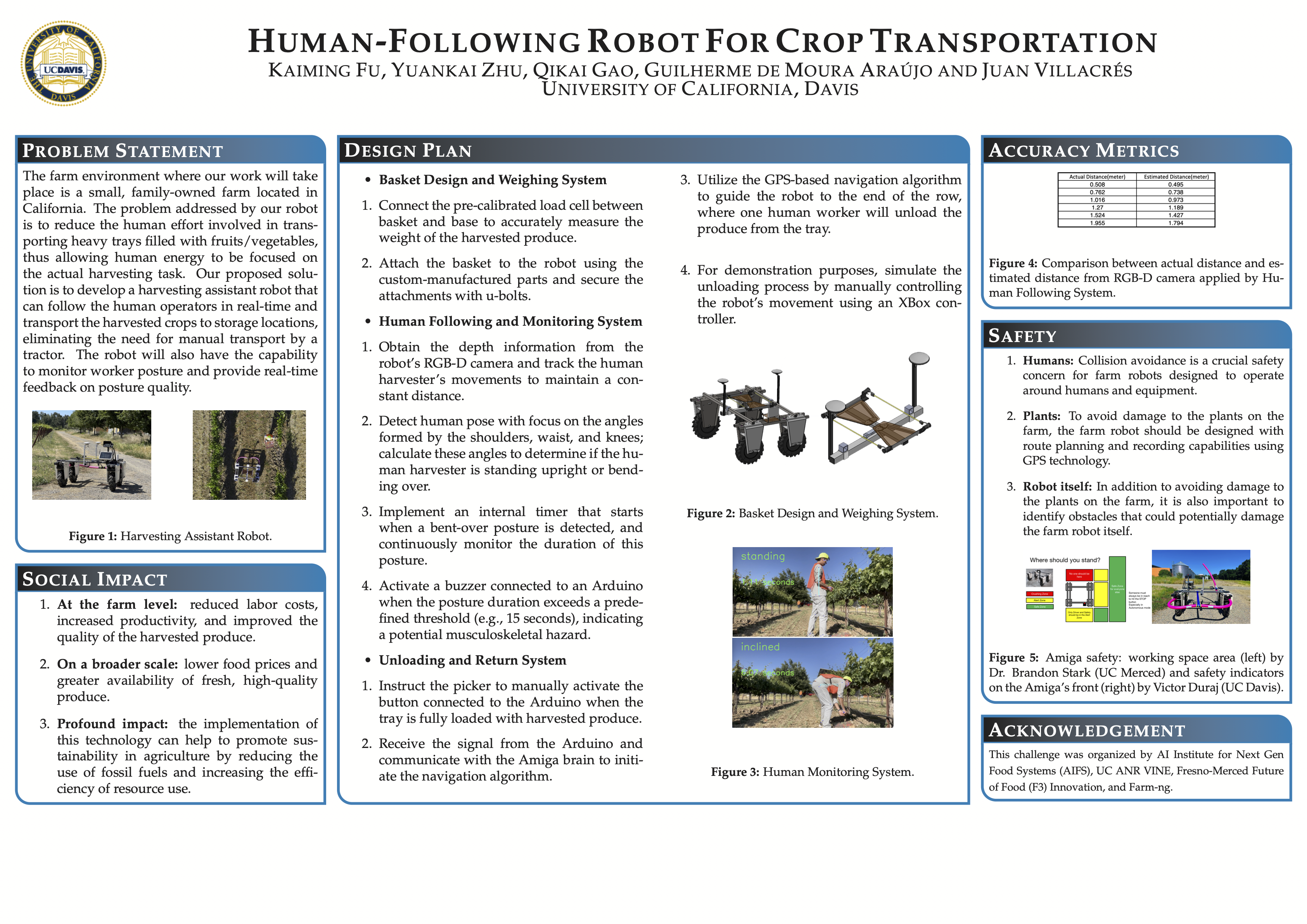
Topic: Human-following Robot for Crop Transportation
The problem addressed by our robot is to reduce the human effort involved in transporting heavy trays filled with fruits/vegetables, thus allowing human energy to be focused on the actual harvesting task. Our proposed solution is to develop a harvesting assistant robot that can follow the human operators in real-time and transport the harvested crops to storage locations, eliminating the need for manual transport by a tractor. The robot will also have the capability to monitor worker posture and provide real-time feedback on posture quality.